|
|
1. 前言
点云局部特征描述子(3D Local Feature Descriptor)对于物体识别(Object Recognition)、点云配准(Registeration)、模型检索(Model Retrieval)等应用具有重要的意义。虽然,近几年深度学习“大行其道”,各种基于数据驱动的描述子开始涌现,但传统的 hand-crafted 特征还是值得学习与借鉴。
PFH 和 FPFH 是 PCL 库的作者 Radu Bogdan Rusu 博士提出的,相关论文如下:
- PFH:Aligning point cloud views using persistent feature histograms. IROS, 2008.
- FPFH:Fast Point Feature Histograms (FPFH) for 3D registration. ICRA, 2009.
- Rusu Dissertation:Semantic 3D Object Maps for Everyday Manipulation in Human Living Environments. 2009.
2. Point Feature Histograms (PFH)
2.1 原理
PFH 特征描述是基于特征点(keypoint)与其邻域点的空间几何关系来编码的。如图1所示,中间红色的特征点作为 query point,在其邻域(指定半径)内搜索 k 个点(蓝色),对于query point 和 k-neighbors 这 k+1 个点,两两配对,可以得到 k(k+1)/2 个点对(point pair)。
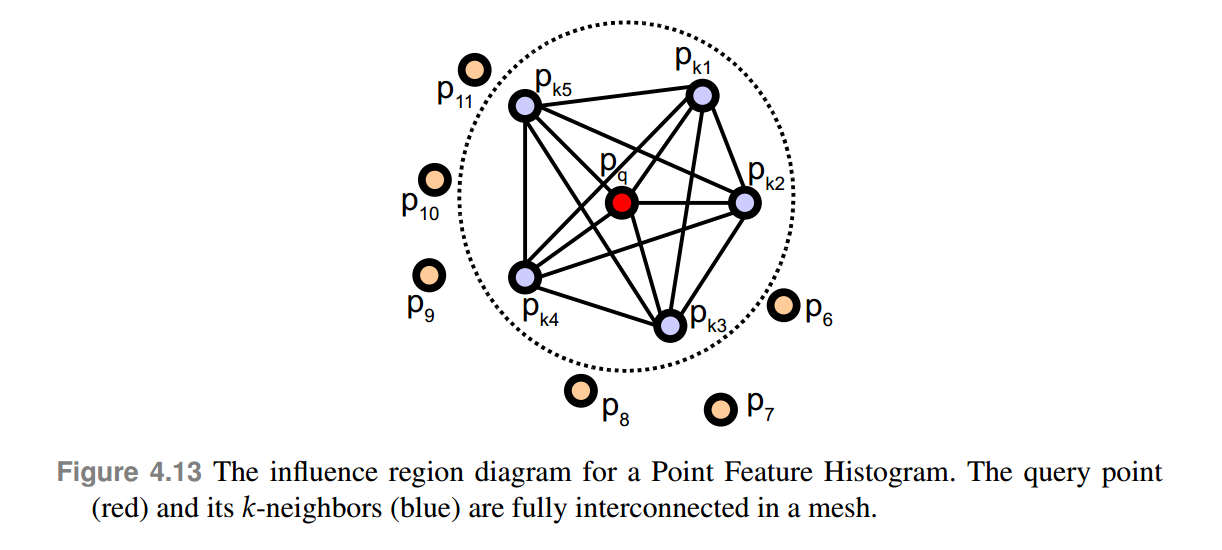
图 1
(1)构建点对坐标系(Pairwise Local coordinate)
对于每一组点对,首先建立局部坐标系:
\begin{align} u &= n_s \\ v &= u\times\frac{(p_t-p_s)}{||p_t-p_s||^2} \\ w &= u \times v \\ \end{align} \\
其中, \times 表示外积。
注意:这里的局部坐标系的概念与 Point Pair Feature(PPF)中的类似,是对关键点支撑区域中的每个点对(point pair)构建的,这是为了计算后面的角度特征;但是,其不同于 SHOT 描述子中的 Local Reference Frame(LRF),在关键点支撑区域(spherical support)内只构建一个 LRF(unique,invariant to rotation, repeatable),基于 LRF 对支撑区域进行特征提取。
(2)特征描述
基于其特征表示为:
\begin{align} \alpha &= v \cdot n_t \\ \phi &= u \cdot \frac{(p_t-p_s)}{d} \\ \theta &= arctan(w\cdot n_t, \ u\cdot n_t) \\ d &= ||p_t-p_s||_2 \\ \end{align} \\
其中, \cdot 表示内积,d 为 source point 和 target point 的欧式距离。
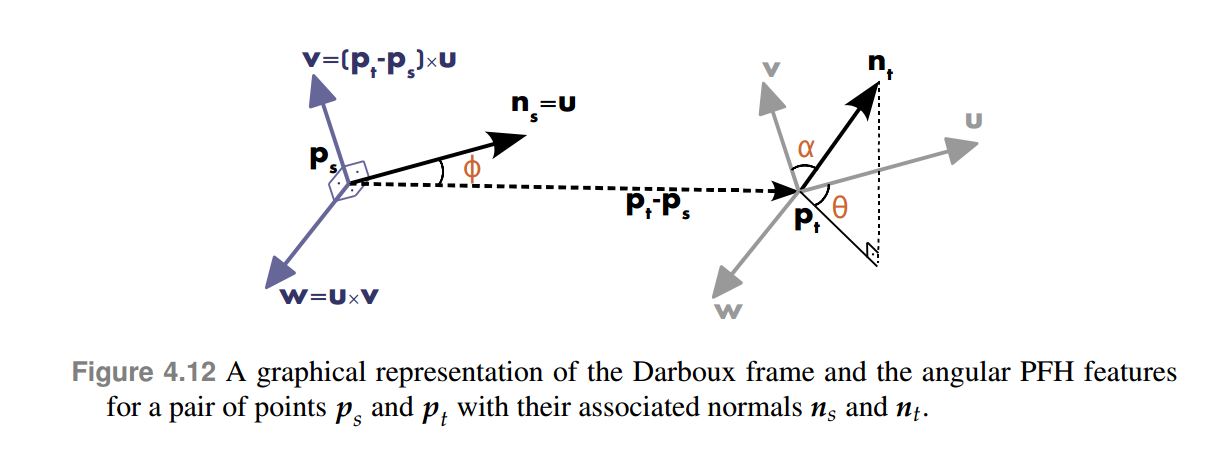
图 2
(3)特征编码
为了计算查询点 p_i 的 PFH 特征,将其邻域 k(k+1)/2 个点对的 quadruplets <\alpha, \phi, \theta, d> 特征集合放在一个直方图中,统计投票数量。具体而言,将每个特征划分为 n 个区间,则 PFH 特征矢量有 n^4 维。前三个特征都为角度,因此可以做归一化处理。
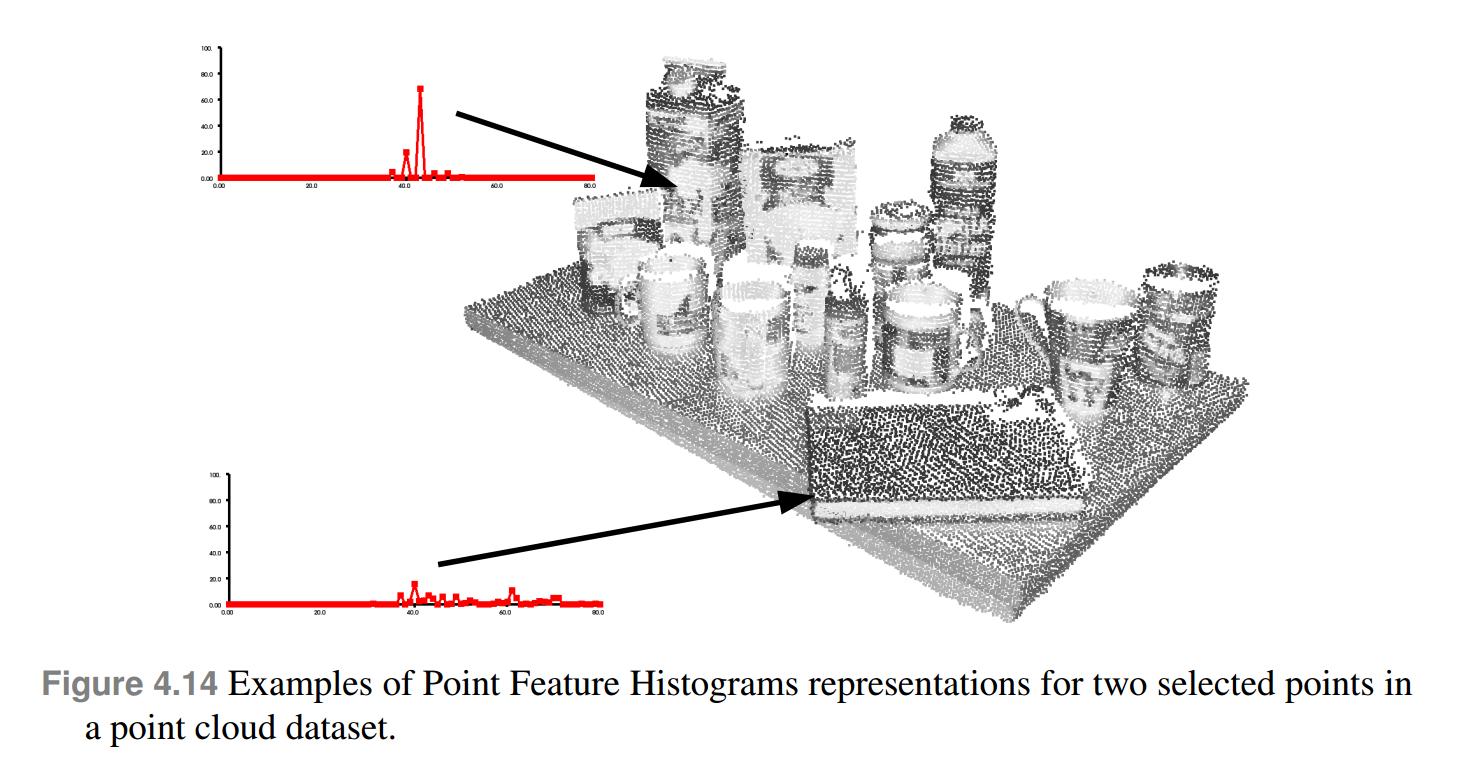
图 3
2.2 PCL 实现
PCL 中 FPH 的实现只取了前三个角度特征,将每个角度特征划分为 5 个 binning subdivisions,因而特征矢量有 125 维(pcl::PFHSignature125)。
#include <pcl/point_types.h>
#include <pcl/features/pfh.h>
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
typedef pcl::Normal NormalT;
typedef pcl::PointCloud<NormalT> PointCloudNT;
{
// 输入点云及其法向量,也可以直接输入带法向量的点云
PointCloudT::Ptr cloud (new PointCloudT);
PointCloudNT::Ptr normals (new PointCloudNT);
// 创建 PFH 描述子
pcl::PFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::PFHSignature125> pfh;
pfh.setInputCloud (cloud);
pfh.setInputNormals (normals);
// 如果输入的是带法向量的点云,可以直接输入 pfh.setInputNormals (cloud)
// 创建 kdtree
pcl::search::KdTree<PointT>::Ptr tree (new pcl::search::KdTree<PointT>);
pfh.setSearchMethod (tree);
// 定义输出
pcl::PointCloud<pcl::PFHSignature125>::Ptr pfhs (new pcl::PointCloud<pcl::PFHSignature125> ());
// 设置搜索球半径 5cm
// 注意!!这里的半径必须大于法向量估计时的半径
pfh.setRadiusSearch (0.05);
// Compute the features
pfh.compute (*pfhs);
// pfhs->points.size () should have the same size as the input cloud->points.size ()*
}
若要求 PFH 描述子,可以通过下面的函数实现:
template<typename PointInT, typename PointNT, typename PointOutT >
bool pcl::PFHEstimation<PointInT, PointNT, PointOutT>::computePairFeatures(
const pcl::PointCloud<PointInT> & cloud,
const pcl::PointCloud<PointNT> & normals,
int p_idx, // the index of the first point (source)
int q_idx, // the index of the second point (target)
float & f1, // angle between the projection of nq_idx and u
float & f2, // angle between nq_idx and v
float & f3, // angle between np_idx and |p_idx - q_idx|
float & f4 // the distance feature (p_idx - q_idx)
)
若 k 邻域已知,则可以通过下面函数来计算 PFH 特征描述子:
template<typename PointInT, typename PointNT, typename PointOutT>
void pcl::PFHEstimation<PointInT, PointNT, PointOutT>::computePointPFHSignature(
const pcl::PointCloud<PointInT> & cloud,
const pcl::PointCloud<PointNT> & normals,
const std::vector<int> & indices, // k 近邻点集合
int nr_split, // 表示 bins 的数量
Eigen::VectorXf & pfh_histogram // 输出的特征描述子
)
注意:为了计算效率,PFHEstimation 默认没有检查法向量是否包含 NaN 或 infinite value,所以在调用 complete() 函数之前需 check 一下:
for (int i = 0; i < normals->points.size(); i++)
{
if (!pcl::isFinite<pcl::Normal>(normals->points))
{
PCL_WARN(&#34;normals[%d] is not finite\n&#34;, i);
}
}
3. Fast Point Feature Histograms (FPFH)
3.1 原理
对于一个查询点,计算 PFH 特征的时间复杂度为 O(k^2) ,若一个点云有 n 个点,则时间复杂度为 O(nk^2),效率非常低。因而,Rosu 博士在保留 PFH 核心思想上提出了 Fast PFH(FPFH)特征描述子,将计算复杂度将为 O(nk)。具体而言:
(1)将 <\alpha, \phi, \theta, d>特征简化为 <\alpha, \phi, \theta>,这称为 Simplified Point Feature Histogram (SPFH);
(2)修正了 k 邻域点对的统计方式,分为两部分:一部分是查询点 p_q 与周围 k 个点组成的点对,另一部分是每个邻点与周围 k 个点组成的点对,第二部分的统计量取加权平均,如下式:

其中,权重 w_k 表示查询点 p_q 与邻点 p_k 的距离。这将搜索空间扩大到最多 2r 的范围。
(3)PFH 的特征空间是 fully correlated,假如有3个角度特征,每个特征分为5份,则有 5^3=125 维,可以用一个 5\times5\times5 的立方体格子来描述,每个小格子同时对应着三个特征。这种描述方式会造成很多小格子中的值为0,有点 redundant,不够 compact。一种简化的方法是直接将三个特征的特征矢量线性连接在一起,因而有15维。
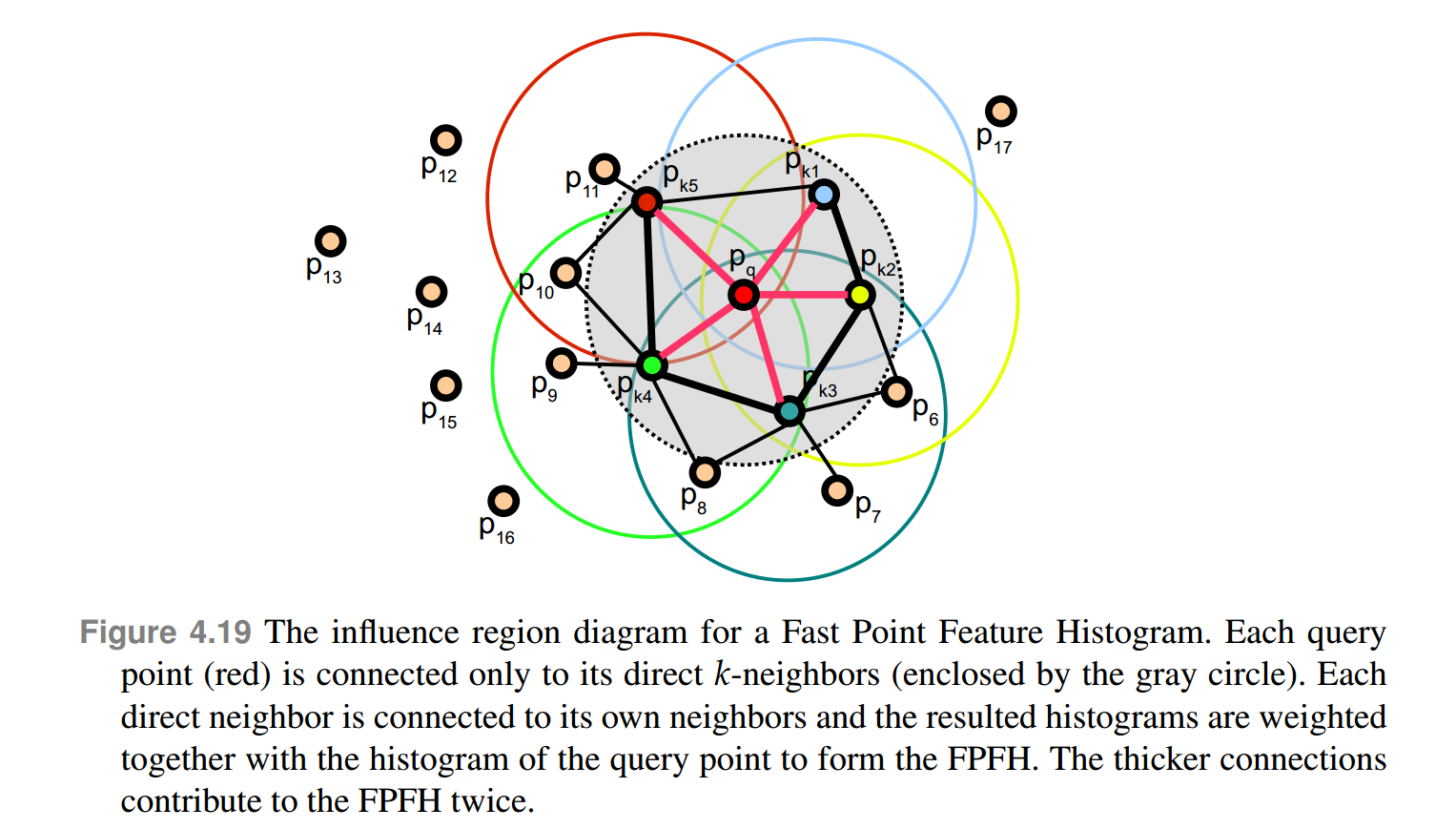
图 4
FPFH 特征的计算流程如下图所示。
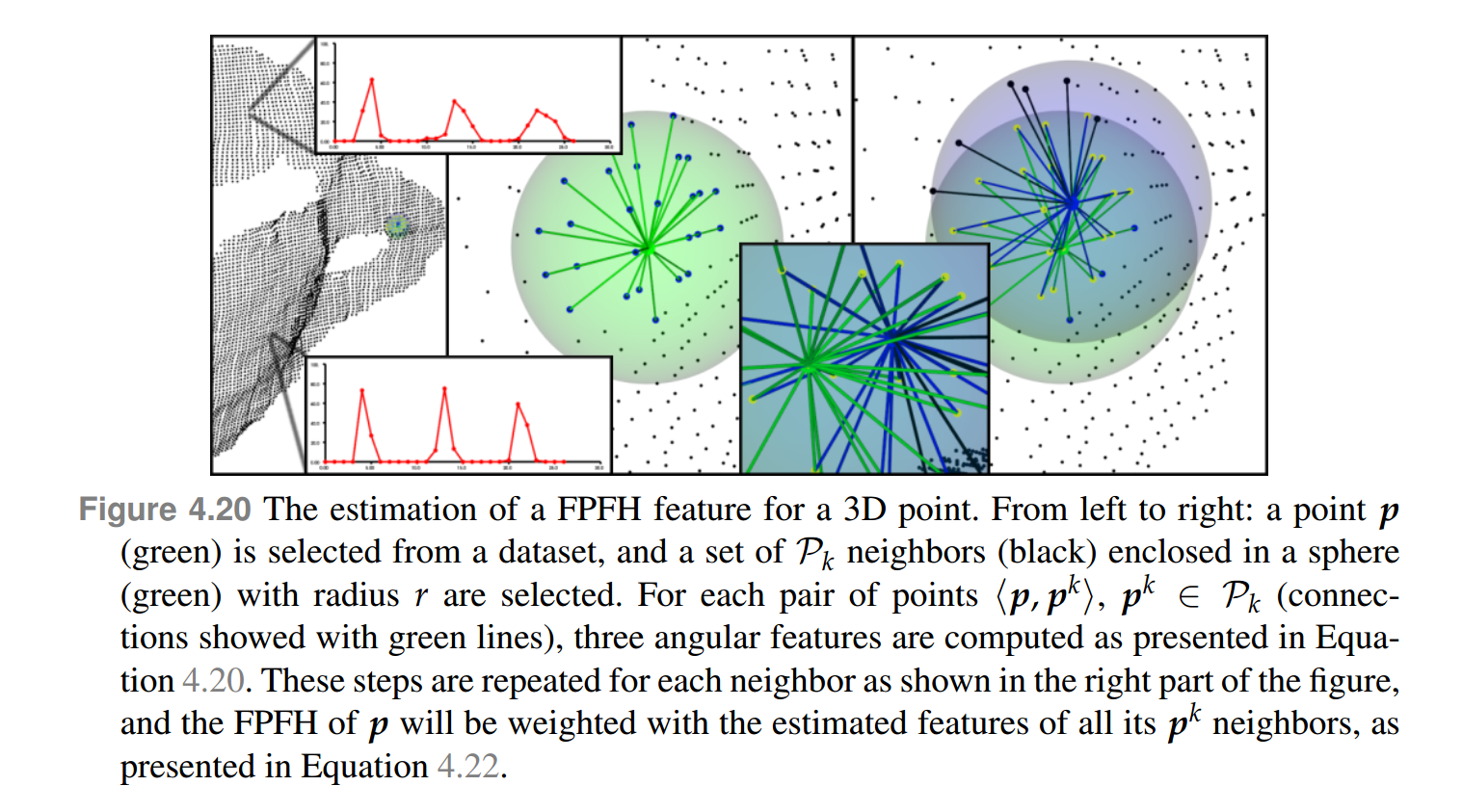
图 5
3.2 PCL实现
PCL 将三个角度特征中的每一个划分为 11 等份,因而特征矢量有33维,描述子pcl::FPFHSignature33,如下。
#include <pcl/point_types.h>
#include <pcl/features/fpfh.h>
{
// 创建 FPFH 描述子
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
// 定义输出
pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfhs (new pcl::PointCloud<pcl::FPFHSignature33> ());
}
PCL还实现了 OpenMP 加速的版本:pcl::FPFHEstimationOMP,在8核的机器上,可以加速6-8倍。
FPFH 特征直方图可视化:
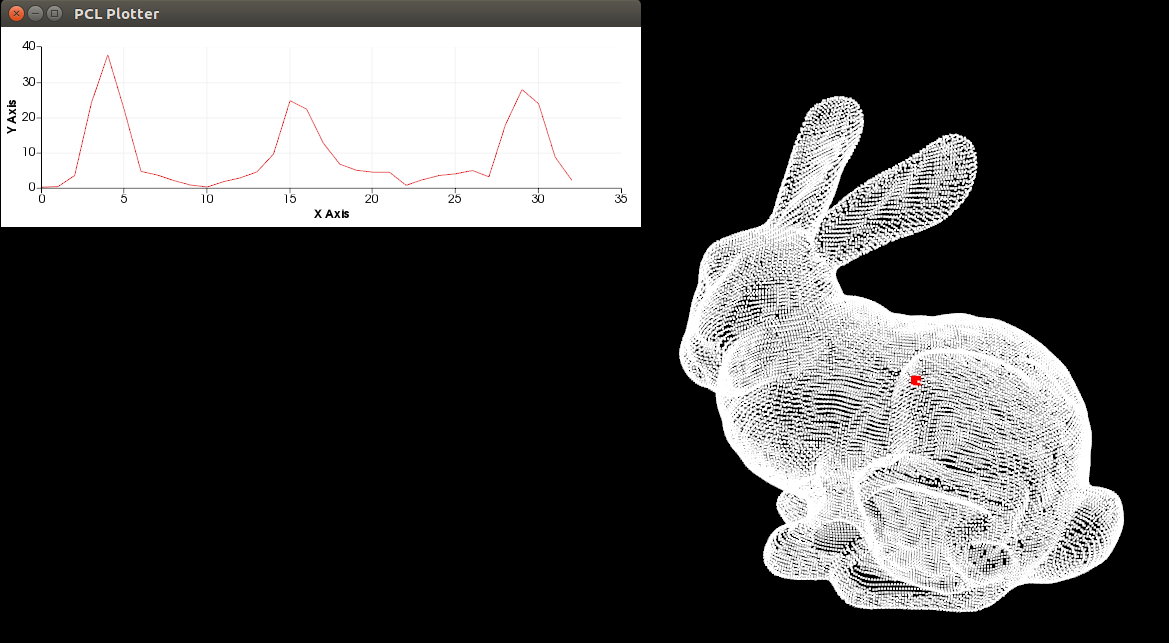
图 6 |
|



 发表于 2023-3-6 15:53:16
发表于 2023-3-6 15:53:16